Robotics
In addition to building, simulating and controlling a 5 degree of freedom robot arm, I am experimenting with pneumatic jamming and soft grippers.
5 DoF Robot Arm
Arm Construction
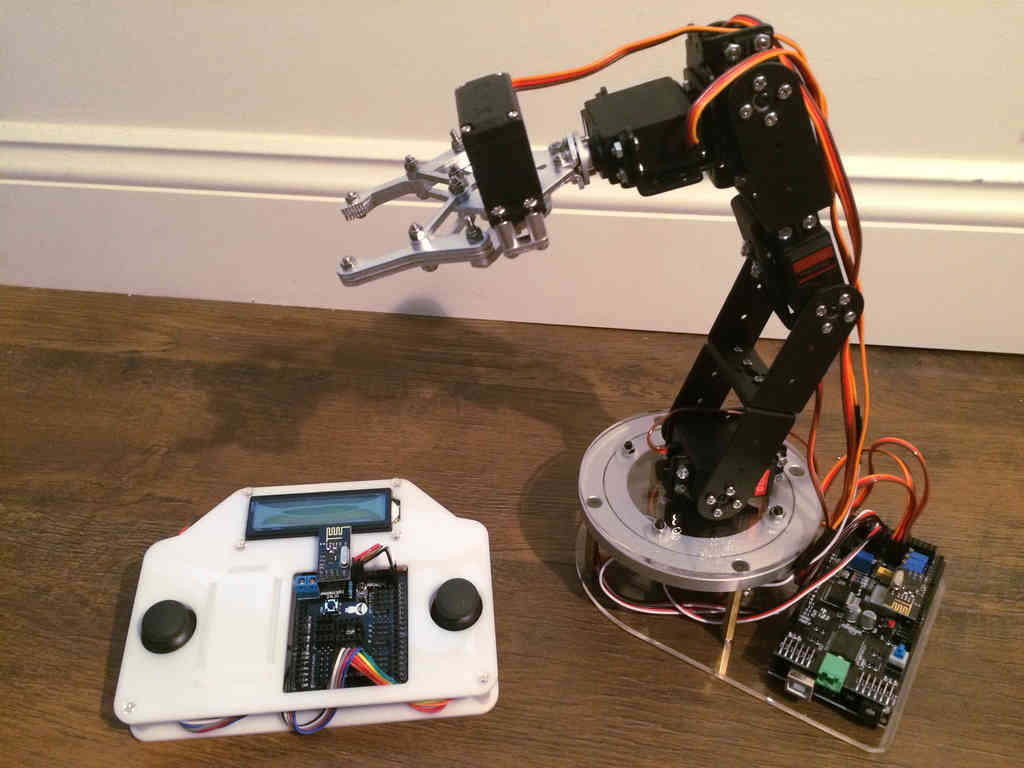
Constructing the arm was a multi-step process. The first step covered the basic arm build. To increase the arm's stability, I replaced the base with a rotatable platform. I then integrated all of the servos and electronics, along with writing basic code that demonstrates how the arm moves, and advanced code that allows the Arduino Uno based remote to wirelessly control the Arduino Mega2560 robot arm.
CAD Model
Even though I have a working physical arm, I designed a CAD model of the arm in Fusion 360, so that I could perform Gazebo simulations. Simulations are very helpful when building advanced control algorithms because you don't have to worry about causing damage or wear to the robot. It also enables you to have a team of engineers working on the software simultaneously, regardless of how many physical robots you have.
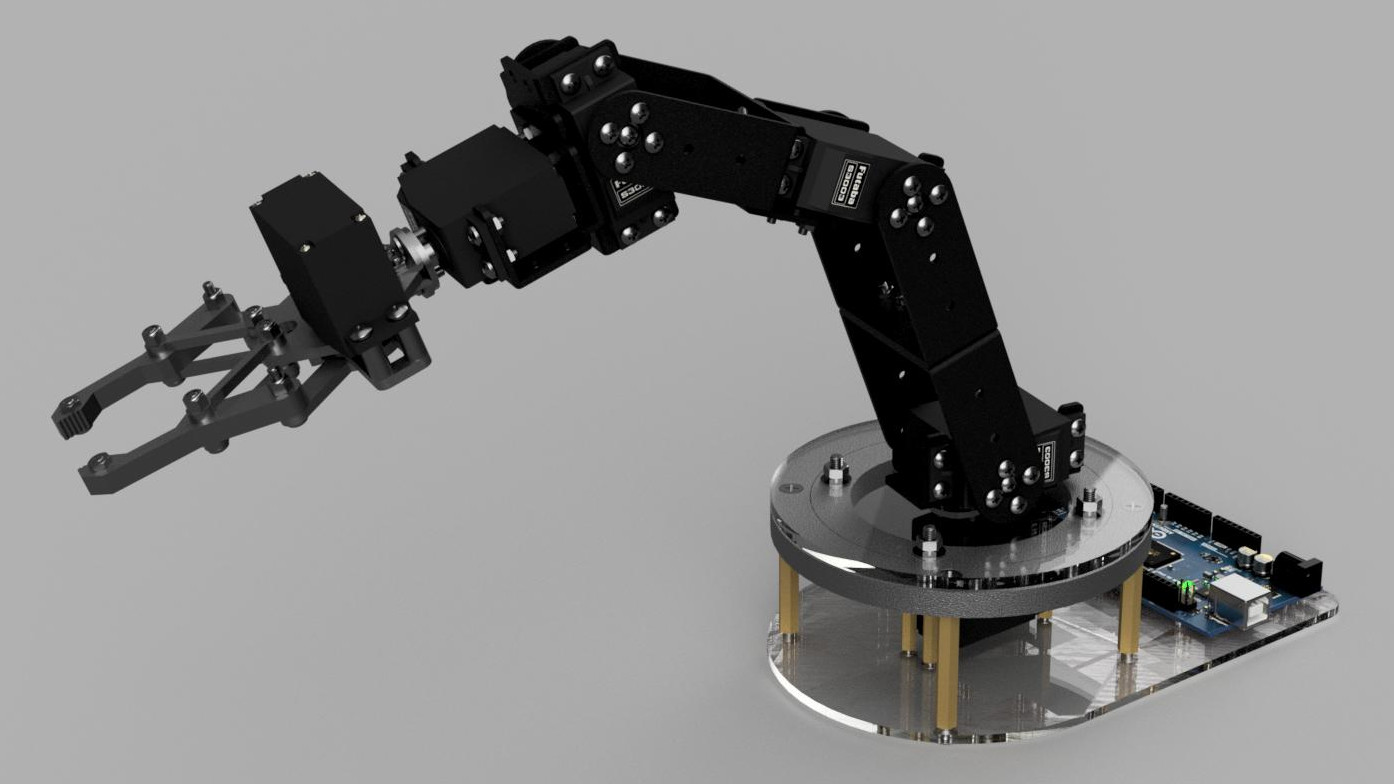
I used Fusion 360 to design the arm from scratch, except for the servo and the Arduino Mega models. Each arm joint is able to rotate, including each gripper link. I estimate that the model has an measurement error tolerance of 0 - 1 mm per component, which is good enough for my uses.
Pneumatic Grippers
In order to provide a better mechanism for picking up objects, I am experimenting with pneumatic grippers, including jamming and soft grippers. These grippers use soft rubbers to interface with objects. This allows the gripper to move delicate and unusually shaped objects. The grippers are also require less sophisticated software because the gripper orientation is less important than it is with a traditional finger gripper.
Jamming Gripper
Jamming grippers use a soft rubber bag filled with granular material that is able to surround an object, then securely grip the object when a vacuum is applied to the bag, forcing the granular material to stiffen in the shape of the object. This is a surprisingly low tech solution to a very hard problem.
The first prototype jamming gripper I made uses coffee grounds, a balloon and a syringe. I am very eager to build a more robust system that I will be able to integrate onto the robot arm I'm using.
